Project: DVL - Developmental Learning for Autonomous Robots
Technical details:
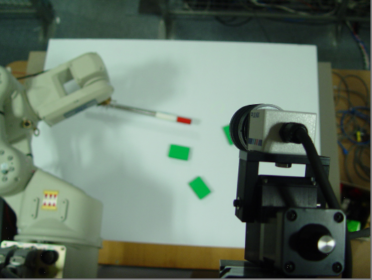
Our laboratory testbed consists of 2 AdeptOne robot arms mounted on a vertical plane, and a Pulnix firewire CCD camera on a Directed Perception pan and tilt head. These are arranged in a spatial configuration related to the shoulder/head geometry of young infants.
Research / Projects:
We are using data and theory from Developmental Psychology as inspiration for building learning algorithms that allow robots to discover, coordinate and control their own sensory-motor systems. Human infants display enormous learning abilities in their first year and our research is aimed at understanding this in order to create truly self-learning systems. This research continues work from the DVL project (EPSRC grant GR/R69679/01) and involves 2 phd projects:
- Developmental Learning in Hand/Eye coordination - Fei Chao
- Memory and Association in Developmental Sytems - James Wilson
Related publications:
- [Lee, M., Meng, Q., Chao, F.] Staged Competence Learning in Developmental Robotics. Adaptive Behavior, 15(3), pp 241-255, 2007.
- [Lee, M., Meng, Q., Chao, F.] Developmental Learning for Autonomous Robots. Robotics and Autonomous Systems, 55(9), pp 750-759, 2007.